这个名字真不知道怎么取,因为要表达的信息太多了。先让我表达一下此刻的心情——我好激动!!!!我终于能够克服心里障碍,会自己看处理器的手册,并编写代码操作硬件了!
先来说一下硬件环境和这篇文章的来由。我在看《Linux Device Driver》一书,看完了中断处理,就想自己来试一试。本来想着,可以直接用Linux提供的GPIO子系统来监听引脚上的电平变化,作为中断源。可是呢,Orange Pi居然没有现成的GPIO子系统!或许是我姿势不对,不过按照网上的方法,就是没法通过/sys/class/gpio目录下的文件来读写GPIO。这把我逼急了,我就想着,趁着这个机会研究一下如何直接和硬件打交道。操作硬件嘛,无非就是读写寄存器咯。读写寄存器嘛,可以直接通过读写内存地址的方式来读写。我知道很简单!然而道理我都懂,就是做不到。为啥?因为我对这么底层的东西一直有一种恐惧。一方面是从来没有在Linux上读写过寄存器,另一方面是看到600多页的芯片手册就望而却步。不过呢,随着之前通过I2C子系统操作过ADXL345,我已经对硬件不是那么害怕了(更何况我用单片机操作硬件非常溜啊)。而如今又把大半本《Linux Device Driver》英文版啃完了,还怕英语资料?于是我毅然决定——怼死他!本来呢,我想在Linux驱动程序中实现对GPIO寄存器的读写的,但是后来看别人的博客,发现可以使用mmap直接把一段物理地址映射到用户空间,就能在用户态读写了。想想调试用户态程序方便得多,我就先试试用户态吧~
本文封装了一个在全志H3(包括H3的阉割版H2+)处理器上操作GPIO的函数库。不过呢,只实现了最基本的读写逻辑电平,并没有完全发挥H3的GPIO的能力(比如上拉下拉电阻)。不过对于理解如果在用户态通过内存映射(mmap)操作寄存器已经绰绰有余了。
================阶段一:H3的GPIO寄存器==============
首先肯定是要来看一下H3的GPIO寄存器的分布和功能位。从Allwinner_H3_Datasheet_V1.2.pdf的316页开始就是介绍GPIO寄存器了。首先看到的就是一个非常重要的信息——GPIO的基址是0x01C20800:

接下来就是每一个端口的寄存器排布。对于每一个端口,总共有9个寄存器:
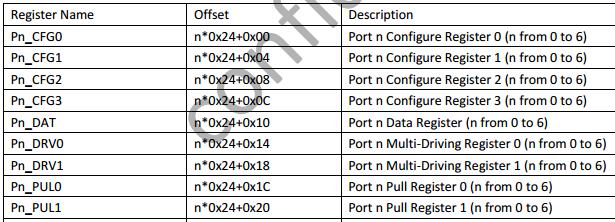
以第0个端口为例,那么它就有P0_CFG0、P0_CFG1、P0_CFG2、P0_CFG3、P0_DAT、P0_DRV0、P0_DRV1、P0_PUL0和P0_PUL1这么九个寄存器。这九个寄存器的地址相对于0x01C20800的偏移量分布是0x00、0x04、0x08,以此类推。比如我们想操作P3_DAT寄存器,那么它的物理地址就是0x01C20800+3*0x24+0x10。很简单吧~
那么每个寄存器是什么功能呢?这个就要继续往下看。在317页,有关于PA_CFG0的描述。哦对了,这里估计是文档的失误,P0就是PA,P1就是PB,以此类推。
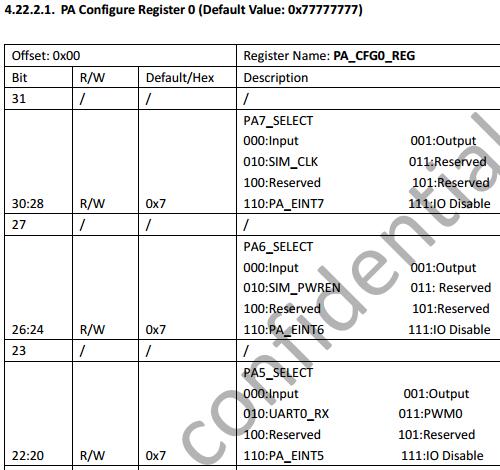
可以看到,PA_CFG0的每四个位(三位有效+一位无效)控制一个引脚的工作方式,于是PA_CFG0能够控制32/4=8个引脚,分别是PA0~PA7。那么还有PA_CFG1、PA_CFG2等等,就是控制A端口其他引脚的工作方式。
能够设置工作方式之后,就需要读写电平了。往下看,看到PA Data Register,可以发现PA_DAT非常简单,第i位就代表第i个引脚的电平。如果工作方式是输出,那么就写那一位,如果是读,就读取那一位。
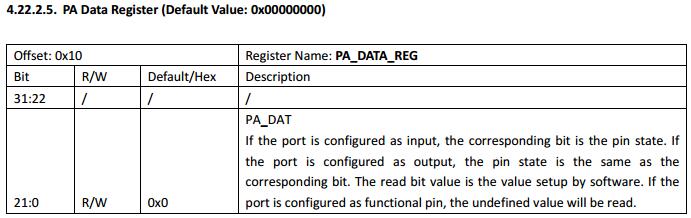
至此就能读写GPIO电位了。
===============阶段二:Linux用户态读写物理地址==============
现代的处理器对于外设的操作基本都是通过内存映射的方式,也就是把外设的寄存器映射到某个内存地址上,读写该地址就是在读写寄存器。现在知道了要操作的寄存器的地址,比如要操作0x01C21000,那么是不是就直接把0x01C21000赋值给一个指针,然后读写呢?在没有虚拟内存的情况下确实是这样的。但是有了虚拟内存后,用户态中的地址0x01C21000并不是物理地址,而是虚拟地址,它具体对应物理地址的哪里,根本不知道,甚至根本就没有对应的物理地址。要在用户态直接操作物理地址,必须先进行内存映射,也就是mmap,把一段虚拟地址和一段物理地址对应起来。
来看一下mmap的函数原型:
void* mmap(void* start,size_t length,int prot,int flags,int fd,off_t offset);
参数start是用户指定的映射区的开始地址,设置为0时表示由系统决定映射区的起始地址;
参数为length要映射的长度,以字节为单位;
参数prot为权限相关的参数,可以是PROT_EXEC(映射区域可被执行)、PROT_READ(映射区域可被读取)、PROT_WRITE(映射区域可被写入)及它们的合理组合,或者是PROT_NONE(映射区域不能存取);
参数flag影响映射区域的各种特性。在调用mmap()时必须要指定MAP_SHARED 或MAP_PRIVATE。具体如下:
| MAP_FIXED | 如果参数start所指的地址无法成功建立映射时,则放弃映射,不对地址做修正。通常不鼓励用此旗标 |
| MAP_SHARED | 对映射区域的写入数据会复制回文件内,而且允许其他映射该文件的进程共享, 原来的文件会改变 |
| MAP_PRIVATE | 对映射区域的写入操作会产生一个映射文件的复制,即私人的“写入时复制”(copy on write)对此区域作的任何修改都不会写回原来的文件内容。当共享的对象的虚拟存储区域为私有对象时, 修改只会被本进程中改变 |
| MAP_ANONYMOUS | 建立匿名映射。此时会忽略参数fd,不涉及文件,而且映射区域无法和其他进程共享 |
| MAP_DENYWRITE | 只允许对映射区域的写入操作,其他对文件直接写入的操作将会被拒绝 |
| MAP_LOCKED | 将映射区域锁定住,这表示该区域不会被置换(swap) |
参数fd是被映射的文件描述符。
参数offset是指映射区域的首地址相对于文件开头的偏移量,必须是一个内存页大小的整数倍。
啥?文件?What happened?一开始我也一脸懵逼。。。都是内存操作,怎么就出现了文件的概念?
后来才感受到Linux强大到可怕,才意识到Unix先驱们的深谋远虑。mmap()最初是为了解决文件随机读写的问题的。比如我有一个大文件,我想修改其中某几个字节。如果把文件当做一个流,那么必须全部读出来,修改几个字节,再全部写回去,代价非常大!如果能够把文件当做一个块设备,就像内存一样,可以只读写其中几个字节,那么效率就会非常高。于是mmap()诞生了!mmap()把文件中的某一块映射到内存中,然后程序就可以像读写内存一样操作文件了~我想很多数据库系统就是这么实现的吧!
那么mmap()又和物理内存有什么关系呢?确实没有关系,如果“/dev/mem”这个设备文件不存在的话~~~~Linux开发者发现,如果把整个物理内存看做一个文件,那么就能够使用mmap()把物理内存中的某一段映射到虚拟内存中,然后读写!哇塞,这样应用程序就能操作硬件了!这就是用户态驱动程序兴起的技术基础!
比如我想读写物理地址为0x01C21000的那个字节,那么就这样:
int fd=open("/dev/mem",O_RDWR);
if(fd<0)
return 1;
void* ptr=mmap(0,1,PROT_READ|PROT_WRITE,MAP_SHARED,fd,0x01C21000);
if(ptr==MAP_FAILED)
return 1;
*ptr=0x1234;
先打开”/dev/mem”设备文件,然后通过mmap映射到虚拟空间,就可以直接使用指针读写啦~
不过需要注意一点!mmap()的offset参数必须是内存页大小的整数倍。在大多数架构上,页大小是4096字节,刚好能够整除0x01C21000。如果我们是要映射0x01C21234,那么就得这样了:
int fd=open("/dev/mem",O_RDWR);
if(fd<0)
return 1;
void* map_addr=mmap(0,0x234+1,PROT_READ|PROT_WRITE,MAP_SHARED,fd,0x01C21000);
if(map_addr==MAP_FAILED)
return 1;
void* ptr=map_addr+0x234;
*ptr=0x1234;
也就是说把余数加到虚拟地址上。
另外说明两点:一、如果映射的长度不足一页,就按一页处理;二、为了保险起见,不要假定页大小就是4096,而要使用
uint32_t page_size=sysconf(_SC_PAGESIZE);
来获取页大小。
最后还有!mmap()之后,其实就可以关闭fd了,因为映射关系已经维持,直到调用munmap。
=================阶段三:代码实现================
首先是头文件:
allwinner_h3_gpio.h
#ifndef ALLWINNER_H3_GPIO #define ALLWINNER_H3_GPIO //端口数量 #define GPIO_MAX_PORT_COUNT 7 //GPIO工作方式 #define GPIO_IN 0x00 #define GPIO_OUT 0x01 #define GPIO_DISABLE 0x07 //初始化 int gpio_init(); //设置工作方式,port表示端口,取值为'A'~'G',pin表示引脚,mode为GPIO_IN、GPIO_OUT或GPIO_DISABLE void gpio_set_mode(char port,int pin,int mode); //读取引脚的电平 int gpio_get_value(char port,int pin); //设置引脚的电平 void gpio_set_value(char port,int pin,int value); #endif
然后是实现:
allwinner_h3_gpio.c
#include "allwinner_h3_gpio.h"
#include <unistd.h>
#include <stdint.h>
#include <stdio.h>
#include <fcntl.h>
#include <sys/mman.h>
//一个端口的数据结构
typedef struct
{
//工作方式寄存器
uint32_t cfg[4];
//数据寄存器
uint32_t dat;
//占4字节,暂时不用
uint32_t no_used[4];
}
port_t;
//基地址
#define BASE_ADDR 0x01C20800
//要映射的内存大小
#define MEM_AREA_SIZE (GPIO_MAX_PORT_COUNT*sizeof(port_t))
//port_t数组指针
static port_t* ports=0;
int gpio_init()
{
//避免重复初始化
if(ports!=0)
{
printf("inited already\n");
return 1;
}
//打开/dev/mem
int fd=open("/dev/mem",O_RDWR);
if(fd==-1)
{
perror("open '/dev/mem' failed\n");
return 1;
}
//获取页大小
uint32_t page_size=sysconf(_SC_PAGESIZE);
//计算基址相对于页大小的余数,也就是mmap结果之上的偏移量
uint32_t offset=BASE_ADDR%page_size;
//映射到物理地址
void* map_addr=mmap(0,MEM_AREA_SIZE,PROT_READ|PROT_WRITE,MAP_SHARED,fd,BASE_ADDR-offset);
//映射失败
if(map_addr==MAP_FAILED)
{
perror("mmap failed!\n");
close(fd);
return 1;
}
//可以关闭/dev/mem,对映射关系没有影响
close(fd);
//把数组首地址指过去,此时就指向了第一个端口的第一个寄存器
ports=(port_t*)(map_addr+offset);
return 0;
}
//辅助函数,检查参数,如果合法就找到对应的端口
static port_t* checkAndGetGPIO(char port,int pin)
{
//避免未初始化
if(ports==0)
{
printf("not inited yet!\n");
return 0;
}
//得到端口编号
int port_index=port-'A';
//检查端口编号
if(port_index<0||port_index>=GPIO_MAX_PORT_COUNT)
{
printf("no such port '%c'!\n",port);
return 0;
}
//检查引脚编号
if(pin<0||pin>=32)
{
printf("no such pin '%d'!\n",pin);
return 0;
}
//返回对应编号的端口
return ports+port_index;
}
void gpio_set_mode(char port,int pin,int mode)
{
//获取端口
port_t* pport=checkAndGetGPIO(port,pin);
if(pport==0)
return;
//指向对应的cfg寄存器;因为每个cfg寄存器可以控制8个引脚,所以是第pin/8个cfg寄存器
uint32_t* cfg=&(pport->cfg[pin/8]);
//掩码的左移位数
int shift=(pin%8)*4;
//把cfg寄存器对应的4位清空
*cfg&=~(((uint32_t)0x0f)<<shift);
//把cfg寄存器对应的4位清空设置为mode的低4位
*cfg|=((uint32_t)(mode&0x0f))<<shift;
}
int gpio_get_value(char port,int pin)
{
//获取端口
port_t* pport=checkAndGetGPIO(port,pin);
if(pport==0)
return -1;
//从dat寄存器中读取对应的位
return (pport->dat&(((uint32_t)1)<<pin))>0;
}
void gpio_set_value(char port,int pin,int value)
{
//获取端口
port_t* pport=checkAndGetGPIO(port,pin);
if(pport==0)
return;
//如果为1,就把那一位置位,否则清0
if(value==1)
pport->dat|=((uint32_t)1)<<pin;
else
pport->dat&=~(((uint32_t)1)<<pin);
}
很简单吧~
=================阶段四:测试=================
可以写这么一个测试程序:
#include "allwinner_h3_gpio.h"
#include <unistd.h>
#include <stdio.h>
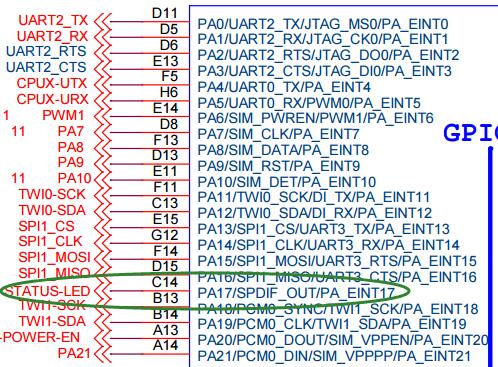
//PA17是Orange Pi Zero自带的一个红色LED
#define STATUS_LED 17
int main()
{
gpio_init();
gpio_set_mode('A',STATUS_LED,GPIO_OUT);
while(1)
{
gpio_set_value('A',STATUS_LED,1);
usleep(100000);
printf("%d\n",gpio_get_value('A',STATUS_LED));
gpio_set_value('A',STATUS_LED,0);
usleep(100000);
printf("%d\n",gpio_get_value('A',STATUS_LED));
}
return 0;
}
你问我怎么知道自带的LED连接的是PA17?那就要看orange_pi-zero-v1_11.pdf中第6页中GPIO与CPU的连接图了:
当然,还需要再看LED的接法:

因此,PA17输出1时LED亮,输出0时LED灭。
不过呢,需要说明的是,orange_pi-zero-v1_11.pdf第4页那个GPIO分配图有问题!
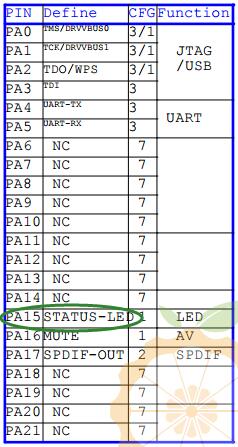
它说STATUS_LED接在PA15上,差点坑死我,我最后才发现原来是文档错了!
运行后,会发现Orange Pi Zero上一个红色的小灯会不断闪烁,控制台不断输出1,0,1,0…: